隨著新一輪科技革命和產業(yè)變革的深入發(fā)展,5G與工業(yè)互聯(lián)網的融合正成為推動制造業(yè)數(shù)字化轉型和高質量發(fā)展的關鍵引擎。在這一進程中,作為工業(yè)互聯(lián)網平臺的領軍者,卡奧斯COSMOPlat正經歷著從單一場景的技術探索,到提供系統(tǒng)性、園區(qū)級解決方案的戰(zhàn)略躍遷,致力于推動“5G+工業(yè)互聯(lián)網”應用走深走實。與此在萬物互聯(lián)的背景下,互聯(lián)網安全服務已成為保障這一宏大進程穩(wěn)健前行的基石,與平臺發(fā)展深度融合、缺一不可。
一、 從場景切入:夯實5G+工業(yè)互聯(lián)網應用根基
卡奧斯平臺的實踐始于對具體工業(yè)場景的深度賦能。通過將5G技術大帶寬、低時延、廣連接的特性與工業(yè)互聯(lián)網平臺的數(shù)據匯聚、分析、建模能力相結合,卡奧斯在多個關鍵場景實現(xiàn)了突破:
- 設備遠程運維與預測性維護: 利用5G網絡實時傳輸高精度設備運行數(shù)據至卡奧斯平臺,通過工業(yè)大數(shù)據分析和AI算法模型,實現(xiàn)設備狀態(tài)的實時監(jiān)控、故障預警與遠程診斷,極大降低了非計劃停機時間和維護成本。
- 機器視覺與智能質檢: 部署5G+高清工業(yè)相機,將采集的海量圖像數(shù)據高速上傳至邊緣或云端,依托卡奧斯平臺的AI視覺識別能力,實現(xiàn)產品外觀缺陷的毫秒級自動檢測與分類,顯著提升質檢效率和一致性。
- AR/VR遠程輔助與培訓: 基于5G網絡,工人可通過AR眼鏡或VR設備,實時獲取設備操作指引、維修步驟疊加信息,或接受沉浸式技能培訓,專家亦可遠程“身臨其境”地進行指導,打破時空限制,提升作業(yè)安全性與效率。
- 柔性生產與AGV調度: 在柔性制造產線中,通過5G網絡精準控制AGV(自動導引運輸車)的實時路徑規(guī)劃和協(xié)同作業(yè),并與卡奧斯平臺的生產訂單系統(tǒng)、倉儲管理系統(tǒng)無縫對接,實現(xiàn)物料精準配送與生產流程的動態(tài)優(yōu)化。
這些場景化應用的深入探索,不僅驗證了技術可行性,更積累了寶貴的工業(yè)知識、數(shù)據與模型,為更大范圍的集成應用奠定了基礎。
二、 邁向園區(qū)級解決方案:構建產業(yè)數(shù)字化新生態(tài)
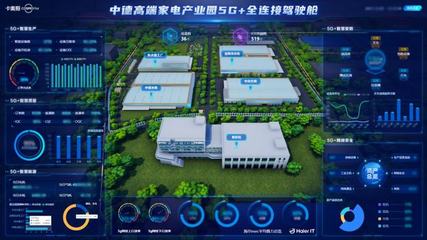
卡奧斯并未止步于單點場景的優(yōu)化,而是將視野拓展至整個工業(yè)園區(qū)或產業(yè)集群,提供“5G+工業(yè)互聯(lián)網”的園區(qū)級整體解決方案。這一躍遷意味著:
- 基礎設施一體化部署: 統(tǒng)籌規(guī)劃與部署園區(qū)級的5G專網、邊緣計算節(jié)點、物聯(lián)網感知體系,并與卡奧斯工業(yè)互聯(lián)網平臺中樞互聯(lián),形成“云-邊-端”協(xié)同的一體化數(shù)字基礎設施,為園區(qū)內各類企業(yè)提供普惠、可靠、低成本的連接與算力服務。
- 應用服務集約化供給: 基于平臺,將已驗證的各類工業(yè)APP、數(shù)據模型、解決方案(如能源管理、供應鏈協(xié)同、環(huán)保監(jiān)測、安全生產等)以服務化形式提供給園區(qū)企業(yè),企業(yè)可根據自身需求靈活訂閱,降低數(shù)字化轉型門檻和試錯成本。
- 數(shù)據價值跨域釋放: 在保障數(shù)據主權與安全的前提下,促進園區(qū)內上下游企業(yè)間設計、生產、物流、能耗等數(shù)據的可信流通與協(xié)同,基于卡奧斯平臺的數(shù)據分析能力,優(yōu)化園區(qū)整體資源配置效率,孵化產業(yè)鏈協(xié)同創(chuàng)新模式。
- 產業(yè)生態(tài)協(xié)同賦能: 卡奧斯作為生態(tài)組織者,連接設備商、運營商、軟件開發(fā)商、安全服務商、高校及科研院所等各方資源,共同為園區(qū)提供從規(guī)劃、建設、運營到持續(xù)演進的全生命周期服務,構建共生共贏的產業(yè)數(shù)字化新生態(tài)。
三、 筑牢安全防線:互聯(lián)網安全服務貫穿始終
在“5G+工業(yè)互聯(lián)網”從場景到園區(qū)縱深發(fā)展的每一步,安全都是不可逾越的底線。海量設備接入、數(shù)據跨域流動、應用云端部署,極大地擴展了網絡攻擊面。卡奧斯深刻認識到,賦能工業(yè)數(shù)字化轉型必須將安全能力內生于平臺與服務之中:
- 構建縱深防御體系: 從終端設備安全、邊緣網關安全、網絡傳輸安全(特別是5G切片安全)、平臺云安全到應用安全,構建覆蓋全棧的縱深防御體系。采用身份認證、訪問控制、數(shù)據加密、入侵檢測等多種技術手段,確保各層次安全。
- 聚焦工業(yè)安全特性: 針對工業(yè)控制協(xié)議安全、工控設備漏洞管理、生產連續(xù)性保障等工業(yè)特有需求,提供專業(yè)的安全監(jiān)測、審計與防護服務,確保工業(yè)生產過程的安全可靠。
- 強化數(shù)據安全與隱私保護: 建立完善的數(shù)據分類分級、安全審計、脫敏加密和流轉管控機制,利用區(qū)塊鏈等技術探索數(shù)據可信共享路徑,在挖掘數(shù)據價值的同時嚴格保護企業(yè)數(shù)據資產和用戶隱私。
- 提供安全即服務(SECaaS): 將安全能力(如威脅情報、漏洞掃描、安全態(tài)勢感知、應急響應等)平臺化、服務化,使園區(qū)及企業(yè)用戶能夠像使用水電一樣便捷地獲取專業(yè)的安全防護,降低自身安全運營難度與成本。
- 推動安全生態(tài)共建: 與頂尖網絡安全企業(yè)、研究機構合作,共建工業(yè)互聯(lián)網安全實驗室,共同研究前沿安全技術、制定標準規(guī)范、培養(yǎng)專業(yè)人才,提升整體產業(yè)的安全水位。
從精準賦能單個場景,到系統(tǒng)構建園區(qū)級數(shù)字化基座,卡奧斯COSMOPlat正引領著“5G+工業(yè)互聯(lián)網”向更廣范圍、更深層次、更高水平邁進。這條“走深走實”之路,既是技術融合應用之路,也是產業(yè)生態(tài)協(xié)同之路,更是一條必須將互聯(lián)網安全服務深度融入、作為核心支撐的可持續(xù)發(fā)展之路。唯有堅持創(chuàng)新驅動與安全護航并重,才能真正釋放“5G+工業(yè)互聯(lián)網”的巨大潛能,賦能制造業(yè)轉型升級,為數(shù)字經濟高質量發(fā)展注入強勁動力。